



RULES
ROBOTICS TRIATHLON
The Robotics Triathlon of the London School of Mathematics and Programming is a cross-platform robotics competition. The event is unusual because it places no constraint on the types of controllers, construction sets or languages used by the teams.
Challenges representing the traditional robotics tasks of autonomous navigation, pick-up and delivery, as well as remote controlled operations create the opportunity for children to apply their programming and robotics skills.
There are three challenges and one bonus task in this competition. Overall score will be calculated as a sum of points from each challenge and the bonus points. Challenges can be attempted several times (see challenge descriptions for details). Teams can take breaks between those attempts
to modify robot or code of the robot. Recommended size of the team is one or two students.
The event will take place on Sunday 28 June 2020 at our South Kensington School based Baden-Powell House: 65-67 Queen's Gate, London SW7 5JS. Event starts at 10:00 in the morning, awards ceremony is planned at around 15:30.
Practice Sessions
Robots will be able to attempt the challenges on practice fields in the morning session of the
event. Practice fields may be available throughout the day, if they are not used for scoring the
challenges of other teams.
Sunday 28 June 2020
COMPETITION
Last year CHALLENGES:
There are three challenges in this competition. Overall score will be calculated as a sum of points from each challenge.
Challenge 1: Line Following
Aim of the challenge
A robot should autonomously travel along a black line on a white background as fast as possible. The line is 50 mm wide, and is printed in such a way that there is at least 15 cm between the line and the border of the printed field.
Ranking and Points
There will be 3 minutes for a robot to finish the course. Each robot will have 3 attempts each attempt will be timed separately, and the best time will be used for ranking.
Points will be awarded according to the rankings as shown in full specification. Each successful attempt will give 3 bonus points.
Challenge 3: Maze
Aim of the challenge
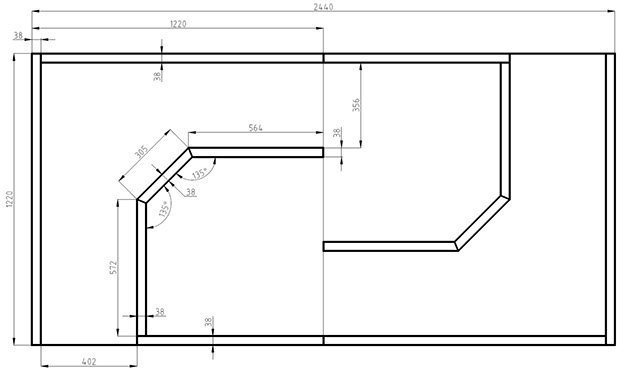
A robot should navigate a maze autonomously as fast as possible. Map of the maze is shown on picture below, actual dimensions of the maze will be within plus-minus 2 cm of what is shown on the map. At the beginning of this task the robot will be placed inside the maze, in the lower left corner. The robot will need to reach the upper right corner. It is allowed for the robot to bump into the walls of the maze, and the use of contact or proximity sensors is recommended. Design of the maze is following The Minimal Maze" challenge of the Pi Wars" competition in Cambridge, UK (https://piwars.org/).
Ranking and points
There will be 5 minutes for a robot to finish the course. Each robot will have 3 attempts; each attempt will be timed separately and the best result will be used for scoring. Each successful attempt will give 3 bonus points.
Challenge 2: Pick-and-place
Aim of the challenge
A soft sponge is installed in an upright position in a holder platform. The centre of the sponge is located on top of a straight black line with width of 50 mm. The side facing the robot is of a light colour and reflects light quite well. A robot is placed at some distance along this straight line from the sponge and the sponge holder, so that no part of the robot is crossing the starting line.
The robot should drive straight along the black line, stop in front of the sponge, grab it with a gripper or any other similar appliance, take the sponge out of the holder (the easiest way is to just drive backwards), then turn either left or right (to be announced on the competition day), take the sponge over the next black line and release it. Sequence of actions for a delivery to the right delivery area is shown in the full specification. The height of the sponge is around 7 cm. To accommodate different sizes of the grippers, there are 2 kinds of sponges - a rectangular one with the width of 5.5 cm, and an inverted T-shape one with the width in the upper part of around 4 cm. Participants can select whichever type of the sponge to use, depending on the construction of the robot. The height of the platform is 1.5 cm, so the gripper should be located at least 2 cm above the floor.
Ranking and Points
There will be 5 minutes for a robot to finish the course. Each robot will have 3 attempts; each attempt will be timed separately and the best result will be used for scoring. Each successful attempt will give 3 bonus points.







![]()
![]()
Bonus Task: Remote Controlled Delivery
Aim of the challenge
Remote controlled robot will be provided for this competition. Participant should control this robot to navigate a maze from the "Maze" challenge. Taking a golf ball from the lower left corner of a maze to the upper right. At the start of the obstacle course the robot and the ball are separate. In the case a ball goes out of bounds of the field or it is stuck in any obstacle in such a way that a robot cannot retrieve it, the ball will be recovered by a judge and placed near to the place where it was stuck in a convenient position. There will be a 20 seconds penalty for each recovery.
Ranking and Points
There will be 3 minutes for a robot to finish the course. Each participant will have 2 attempts;
each attempt will be timed separately and the best result will be used for scoring.
Lectures
Presentations
Everyone says: the world is changing faster than ever before. With the technology advances, the future will be nothing like today.
But what would it be like? And what exactly does it mean for you, and, most importantly, for your children?
We have lined up three inspirational speakers to tell you everything about the world of tomorrow and what is required to fit into it comfortably.
- 11 am The Advancement of Machine Learning by Alexey Utkin, Head of Data and Analytics at DataArt
- 12 pm Robotics from School to University and Beyond by Roman Luchin, CEO of CyberTech Labs and Senior Lecturer in Cybernetics at St Petersburg State University
- 1pm Robotic Skills for the Future by Dr Ildar Farkhatdinov, Lecturer, Queen Mary’s University and Imperial College London
Come join us for an afternoon of insightful conversations with the influential industry experts!
You will also be able to watch young robotics enthusiasts compete in the Annual Robotics Triathlon, part of the UK Robotics Week 2020.
OUR SCHOOL
ABOUT US
The London School of Mathematics and Programming is a unique institution that helps children aged 4 to 17 to develop their intellectual and cognitive skills. We offer independent courses in Mathematics, Programming, Robotics, Chess and Early Intellectual Development.
Our teaching approach is highly systematic. We make sure each subject is thoroughly learned and understood so our pupils solve problems through logic rather than memorizing theory.
Our aim is to help children understand and love mathematics and coding, be inventive, open-minded and strive to think outside the box. To achieve this we provide an engaging and enriching environment in which children can develop their abilities far beyond the ordinary.
To find out more about the school visit www.londonsmp.co.uk.
CONTACTS

The London School of Mathematics and Programming,
37 Kensington High Street, London W8 5ED (Rossotrudnichestvo office).
Let's be friends